Vật lý Lớp 12
Chương 1: Dao động cơ học
Định nghĩa |
Đặc điểm |
|
| DAO ĐỘNG CƠ HỌC |
- Là quá trình chuyển động qua lại quanh một vị trí cân bằng.
|
- Là khái niệm tổng quát |
DAO ĐỘNG TUẦN HOÀN |
- Là dao động cơ học mà cứ sau những khoảng thời gian bằng nhau trạng thái của vật được lặp lại như cũ. Giai đoạn nhỏ nhất được lặp lại trong dao động tuần hoàn gọi là dao động toàn phần (hay một chu trình).
|
- Là khái niệm tập con của dao động cơ |
DAO ĐỘNG ĐIỀU HÒA |
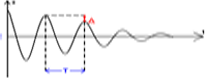
Là dao động tuần hoàn đơn giản nhất, trong đó li độ của vật biến đổi theo hàm cosin của thời gian.
|
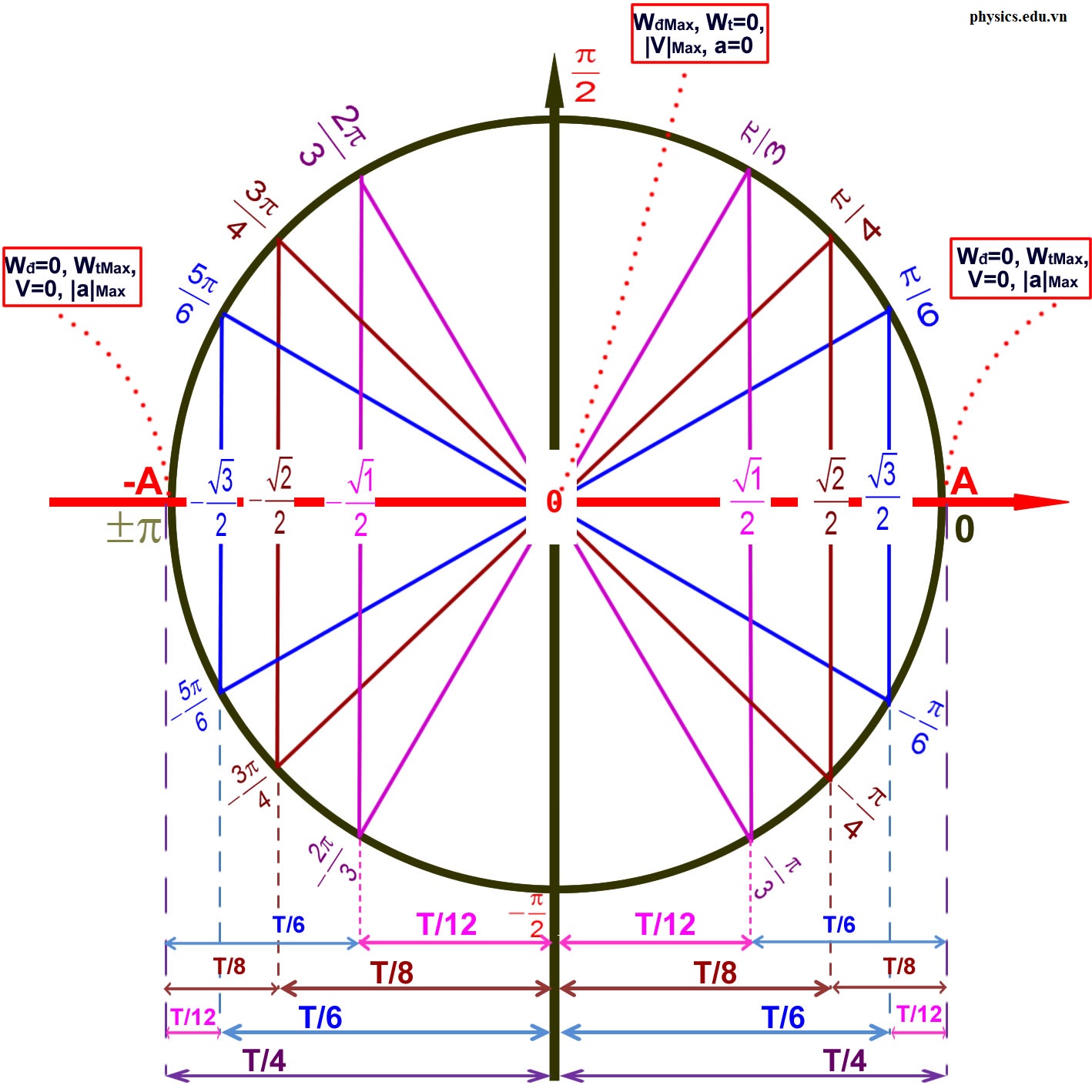
- Là hình chiếu của chuyển động tròn đều xuống đường thẳng trong mặt phẳng quỹ đạo. - Mỗi dao động điều hoà điều hoà được biểu diễn bằng một vectơ quay. - Biên độ dao động A phụ thuộc vào cách kích thích ban đầu. |
| DAO ĐỘNG TỰ DO | Là dao động dưới tác dụng của nội lực. | - Là dao động điều hòa với chu kì riêng T0 và tần số góc riêng ω0 - Phụ thuộc đặc điểm cấu tạo của hệ |
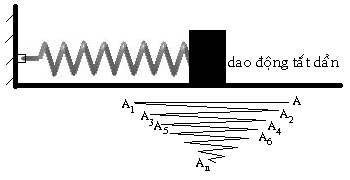
| DAO ĐỘNG TẮT DẦN |
Là dao động có biên độ giảm dần theo thời gian do ma sát.
|
- Không phải là dao động điều hoà. - Phụ thuộc vào biên độ. - Phụ thuộc vào độ nhớt. - Phụ thuộc vào ma sát. * Con lắc lò xo dao động tắt dần với biên độ ban đầu là A và hệ số ma sát là μ. Sau 1 nửa chu kì biên độ còn lại là A1, sau 2 nữa chu kì biên độ giảm còn A2, sau 3 nữa chu kì biên độ giảm còn A3… - Độ giảm biên độ: Theo định luật bảo toàn năng lượng: + Trong ½ dao động thì biên độ giảm: + Trong một dao động thì biên độ giảm: - Số lần đi qua vị trí cân bằng: + Số dao động thực hiện được: - Quãng đường vật đi được: theo định luật bảo toàn cơ năng: - Thời gian vật dao động đến lúc dừng lại: - Tỉ lệ phần trăm năng lượng giảm dần: |
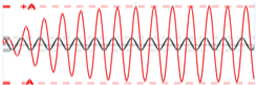
| DAO ĐỘNG CƯỠNG BỨC |
Là dao động chịu tác dụng của ngoại lực tuần hoàn F=F0cos(Ωt)
|
Có hai giai đoạn:
- Giai đoạn chuyển tiếp: Biên độ A tăng dần. - Giai đoạn ổn định: + fCB=fLực + ωCB=ωLực= Ω + A∈(F0, Δf=flực-f0) + Đây là loại dao động điều hòa. |
| DAO ĐỘNG DUY TRÌ |
Là dao động được cung cấp thêm năng lượng để bù trừ năng lượng bị mất do ma sát mà không làm thay đổi tần số riêng.
|
Ngoại lực được điều khiển sao cho: + fDT=f0 + ωDT=ω0 + Biên độ A được duy trì như cũ không đổi. |
| HIỆN TƯỢNG CỘNG HƯỞNG | Là dao động cưỡng bức có biên độ tăng đến giá trị cực đại khi tần số lực cưỡng bức bằng tần số riêng. |
- Biên độ A đạt cực đại. Ma sát càng nhỏ thì A càng lớn (cộng hưởng nhọn). + fCH= fLực= f0 + ωCH= ωLực=Ω= ω0 |

1. Định nghĩa: Dao động điều hoà là dao động mà li độ của vật biến đổi theo định luật dạng cos (hoặc sin) theo thời gian.
2. Tính chất:
- Là hình chiếu của chuyển động tròn đều xuống đường thẳng trong mặt phẳng quỹ đạo.
- Mỗi dao động điều hoà điều hoà được biểu diễn bằng một vectơ quay.
- Biên độ dao động A phụ thuộc vào cách kích thích ban đầu.
3. Chu kì dao động: là khoảng thời gian thực hiện một dao động toàn phần. Hoặc chu kì là khoảng thời gian ngắn nhất vật trở về trạng thái cũ. Chu kì không phụ thuộc vào cách kích thích dao động, chỉ phụ thuộc vào cấu tạo của hệ.
4. Tần số: là số dao động vật thực hiện được trong một giây.
5. Véctơ quay: Mỗi dao động điều hoà được biểu diễn bằng một véctơ quay
5. Phương trình dao động: x=Acos(ωt+φ)
6. Vận tốc tức thời: v=ωAcos(ωt+φ+π/2)
- Vectơ vận tốc
- Đạt giá trị cực đại khi vật qua vị trí cân bằng theo chiều dương (ωA), giá trị cực tiểu khi vật qua vị trí cân bằng theo chiều âm (-ωA).
- Đạt độ lớn cực đại khi vật ở vị trí cân bằng (ωA), độ lớn cực tiểu ở hai biên (0).
- Đồ thị của vận tốc v theo li độ x và theo gia tốc a là đường elip, theo thời gian t là đường cosin.
7. Gia tốc tức thời: a=ω2Acos(ωt+φ+π)=-ω2x
- Vectơ gia tốc
- Có độ lớn tỉ lệ với độ lớn của li độ.
- Đạt giá trị cực đại khi vật ở biên âm (ω2A), giá trị cực tiểu khi vật ở biên dương (-ω2A).
- Đạt độ lớn cực đại khi vật ở hai biên (ω2A), độ lớn cực tiểu ở vị trí cân bằng (0).
- Đồ thị của gia tốc a theo li độ x là đoạn thẳng, theo vận tốc v là đường elip, theo thời gian t là đường cosin.
Liên hệ giữa x và v |
Liên hệ giữa x và a |
Liên hệ giữa a và v |
|
Hệ thức độc lập |
Phương trình bậc 1 |
Hệ thức độc lập |
| Đồ thị (x, v) là đường elip | Đồ thị (x, a) là đoạn thẳng | Đồ thị (a, v) là đường elip |
| V sớm pha π/2 so với x | a sớm pha π so với x | a sớm pha π/2 so với v |
8. Lực kéo về: Fkv=-mω2x
- Là lực làm cho vật dao động điều hòa.
- Là lực kéo vật về vị trí cân bằng, luôn hướng về vị trí cân bằng và đổi chiều tại vị trí cân bằng.
- Có độ lớn tỉ lệ với độ lớn của li độ.
- Đạt giá trị cực đại khi vật ở biên âm (mω2A), giá trị cực tiểu khi vật ở biên dương (–mω2A).
- Đạt độ lớn cực đại khi vật ở hai biên (mω2A), độ lớn cực tiểu ở vị trí cân bằng (0).
- Trong trường hợp lò xo nằm ngang thì lực kéo về chính là lực đàn hồi. Đối với lò xo không nằm ngang thì hai lực này khác nhau.
9. Năng lượng:
- Cơ năng: bằng tổng động năng cộng thế năng:
+ Khi bỏ qua ma sát, cơ năng bảo toàn.
- Thế năng:
+ Đạt giá trị cực đại tại hai biên:
+ Đạt giá trị cực tiểu tại vị trí cân bằng: Wt=0
- Động năng:
+ Đạt giá trị cực đại tại vị trí cân bằng:
+ Đạt giá trị cực tiểu tại hai biên: Wđ=0
* Khi Wđ=nWt thì:
- Li độ:
- Vận tốc:
- Gia tốc:
* Các tỉ số:
- Động năng chia thế năng:
- Động năng chia cơ năng:
- Thế năng chia cơ năng:
* Lưu ý: Dao động điều hoà có tần số góc là ω, tần số f, chu kỳ T. Thì động năng và thế năng biến thiên với tần số góc 2ω, tần số 2f, chu kỳ T/2. Cơ năng không thay đổi.
10. Đồ thị của dao động điều hòa: Đồ thị của dao động điều hòa là đường cosin.

I. Cấu tạo con lắc lò xo: Con lắc lò xo gồm một lò xo có độ cứng k, một đầu cố định, một đầu được gắn vào vật nặng khối lượng m.
1. Điều kiện để con lắc lò xo dao động điều hòa:
- Biên độ dao động nằm trong giới hạn đàn hồi.
- Bỏ qua ma sát.
2. Phương trình dao động điều hòa: x=Acos(ωt+φ)
- Phương trình vận tốc: v = ωAcos(ωt+φ+π/2)
+ Vận tốc sớm pha hơn li độ π/2.
- Phương trình gia tốc: a = ω2Acos(ωt+φ+π)
+ Gia tốc sớm pha hơn vận tốc π/2.
+ Gia tốc sớm pha hơn li độ π.
2. Các công thức cơ bản:
- Tần số góc:
- Chu kì:
- Tần số:
- Lực kéo về: Fkv=-kx
- Cơ năng:
+ Khi bỏ qua ma sát, cơ năng bảo toàn.
- Thế năng:
+ Đạt giá trị cực đại tại hai biên:
+ Đạt giá trị cực tiểu tại vị trí cân bằng: Wt=0
- Động năng:
+ Đạt giá trị cực đại tại vị trí cân bằng:
+ Đạt giá trị cực tiểu tại hai biên: Wt=0
3. Phần công thức mở rộng:
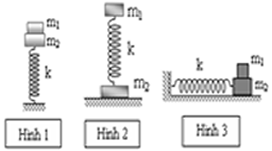
- Điều kiện để hai vật không rời khỏi nhau:
+ Vật m1 được đặt trên vật m2 dao động điều hoà theo phương thẳng đứng (Hình 1). Để m1 luôn nằm yên trên m2 trong quá trình dao động thì:
+ Vật m1 và m2 được gắn vào hai đầu lò xo đặt thẳng đứng, m1 dao động điều hoà (Hình 2). Để m2 luôn nằm yên trên mặt sàn trong quá trình m1 dao động thì:
+ Vật m1 đặt trên vật m2 dao động điều hoà theo phương ngang. Hệ số ma sát giữa m1 và m2 là µ, bỏ qua ma sát giữa m2 và mặt sàn (Hình 3). Để m1 không trượt trên m2 trong quá trình dao động thì:
- Cắt lò xo: Một lò xo có độ cứng k và chu kì T, khi được cắt thành n cái lò xo nhỏ giống hệt nhau, thì mỗi lò xo nhỏ có độ cứng k’=nk và chu kì
- Một lò xo có độ cứng k và chiều dài l được cắt thành các lò xo có độ cứng k1, k2, và chiều dài tương ứng là l1, l2… thì có: kl = k1l1 = k2l2 =....= knln
- Ghép khối lượng: Con lắc lò xo gắn vật nặng m1 có chu kì T1 và con lắc lò xo gắn vật nặng m2 có chu kì T2.
+ Khi mắc hai vật m1+m2 vào lò xo thì chu kì dao động bằng:
+ Khi mắc vật có khối lượng m=m1-m2 vào lò xo thì chu kì dao động bằng:
- Ghép lò xo: Con lắc lò xo có độ cứng k1 có chu kì T1 và con lắc lò xo có độ cứng k2 có chu kì T2.
+ Khi ghép hai lò xo nối tiếp:
. Độ cứng:
. Chu kì:
+ Khi ghép hai lò xo song song:
. Độ cứng:
. Chu kì:
4. Phần công thức thêm riêng của con lắc lò xo treo thẳng đứng: Lò xo treo thẳng đứng có chiều dài tự nhiên là l0, khi mắc vật có khối lượng m và đầu dưới của lò xo và để vật nằm cân bằng, khi đó lò xo giãn một đoạn Δl.
- Độ biến dạng của lò xo thẳng đứng khi vật ở vị trí cân bằng:
- Tần số góc:
- Tần số:
- Chu kì:
- Chiều dài của lò xo:
+ Trường hợp vật treo ở phía dưới:
. Chiều dài cực tiểu của lò xo (khi vật ở vị trí cao nhất): lMax= l0 + Δl - A
. Chiều dài cực đại của lò xo (khi vật ở vị trí thấp nhất): lMax= l0 + Δl + A
. Chiều dài lò xo khi vật ở VTCB: lCB= l0 + Δl =
+ Trường hợp vật nằm ở phía trên:
. Chiều dài cực tiểu của lò xo (khi vật ở vị trí cao nhất): lMin = l0 - Δl - A
. Chiều dài cực đại của lò xo (khi vật ở vị trí thấp nhất): lMin = l0 - Δl + A
. Chiều dài lò xo khi vật ở VTCB: lCB = l0 - Δl =
- Lực đàn hồi:
+ Là lực đưa vật về vị trí lò xo không biến dạng.
+ Có độ lớn tỉ lệ với độ biến dạng của lò xo.
+ Khi vật treo ở dưới:
+ Với chiều dương hướng xuống thì: Fđh= k|Δl + x|
+ Với chiều dương hướng lên thì: Fđh = k|Δl - x|.
+ Khi vật treo ở trên:
+ Với chiều dương hướng xuống thì: Fđh= k|Δl + x|
+ Với chiều dương hướng lên thì: Fđh = k|Δl - x|.
* Trong trường hợp lò xo nằm trên mặt phẳng nghiêng có góc nghiêng α so với phương ngang thì:
I. Cấu tạo con lắc đơn: Con lắc đơn gồm một vật nặng treo vào một sợi dây không giãn, không khối lượng. Vật nặng có kích thước không đáng kể so với chiều dài sợi dây.
1. Điều kiện để con lắc dao động điều hòa:
- Dây treo không giãn, không khối lượng.
- Biên độ dao động nhỏ.
- Bỏ qua ma sát.
2. Phương trình dao động điều hòa:
- Li độ dài: s=S0cos(ωt+φ)
- Li độ góc: α=α0cos(ωt+φ)
Trong đó li độ dài và li độ góc liên hệ nhau qua công thức: s=αl và S0=α0l
3. Các công thức cơ bản:
- Tần số góc:
- Chu kì:
- Tần số:
- Vận tốc: v2=2gl(cosα-cosα0).
+ Vận tốc gần đúng (hệ thức độc lập):
- Lực kéo về: Fkv=-mg.sinα
+ Lực kéo về gần đúng: Fkv ≈-mgα
- Lực căng: T=mg(3cosα-2cosα0)
+ Lực căng đạt độ lớn cực đại khi vật ở vị trí cân bằng: TMax= mg(3-2cosα0)
+ Lực căng đạt độ lớn cực tiểu khi vật ở hai biên: TMin=mg.cosα0
- Cơ năng: W=mgl(1-cosα0).
+ Cơ năng gần đúng: W= mω2S02= mglα02
- Thế năng: Wt=mgl(1-cosα)= mω2s2
+ Đạt giá trị cực đại tại hai biên: WtMax=mgl(1-cosα0)
+ Đạt giá trị cực tiểu tại vị trí cân bằng: Wt=0
- Động năng: Wđ=mgl(cosα-cosα0).
+ Đạt giá trị cực đại tại vị trí cân bằng: WtMax=mgl(1-cosα0)
+ Đạt giá trị cực tiểu tại hai biên: Wt=0
II. Phần công thức mở rộng:
1. Ghép con lắc: Con lắc đơn chiều dài l1 có chu kì T1 và con lắc đơn chiều dài l2 có chu kì T2.
- Khi nối l1+l2 tạo thành con lắc đơn có chu kì:
- Khi nối l1-l2 tạo thành con lắc đơn có chu kì:
2. Con lắc mắc đinh: Con lắc đơn có chiều dài l dao động điều hòa, trên phương thẳng đứng, người ta đóng một cây đinh, chia chiều dài sợi dây thành hai đoạn l1 và l2. Khi đó con lắc sẽ dao động với chu kì:
3. Con lắc đơn dao động trong trọng trường biểu kiến: Khi con lắc đơn chịu tác dụng thêm của lực phụ
- Trọng lực biểu kiến này sinh ra gia tốc trọng trường biểu kiến:
- Do đó chu kì dao động của con lắc bây giờ được xác định bởi:
- Con lắc đơn được treo trên trần thang máy đang đi Lên-Nhanh dần, hoặc đang đi Xuống-Chậm dần. Hoặc quả cầu được tích điện Q > 0 và đặt trong điện trường hướng Xuống, hoặc Q < 0 và hướng Lên. Khi đó ngoại lực cùng chiều với trọng lực
- Con lắc đơn được treo trên trần thang máy đang đi Lên-Chậm dần, hoặc đang đi Xuống-Nhanh dần. Hoặc quả cầu được tích điện Q>0 và đặt trong điện trường hướng Lên, hoặc Q < 0 và hướng Xuống. Khi đó ngoại lực ngược chiều với trọng lực
- Quả cầu được tích điện Q>0 và đặt trong điện trường hướng Ngang hoặc con lắc được treo vào trần chiếc xe đang chạy với gia tốc a theo phương ngang. Khi đó ngoại lực vuông góc với trọng lực
4. Biến thiên của chu kì:
- Biến thiên theo nhiệt độ: Khi thay đổi nhiệt độ thì chiều dài l của con lắc đơn thay đổi: Δl=lαΔt. Từ đó dẫn đến chu kì dao động của con lắc đơn thay đổi
- Biến theo theo độ cao: Khi đưa con lắc lên độ cao h thì gia tốc trọng trường đổi thành:
- Biến theo theo độ sâu: Khi đưa con lắc xuống độ sâu s thì gia tốc trọng trường thay đổi thành
5. Đồng hồ quả lắc: Gọi T là chu kì của đồng hồ chạy đúng, T’ là chu kì con lắc chạy sai. Nếu T’>T thì đồng hồ sẽ chạy chậm (trễ). Nếu T’ < T thì đồng hồ sẽ chạy nhanh (sớm).
- Trong 1 giây đồng hồ thực tế chạy lệch:
- Trong 1 ngày lệch: 86400
1. Véctơ quay: Mỗi dao động điều hoà được biểu diễn bằng một véctơ quay
2. Xác định dao động tổng hợp:
Chọn k=0, ±1 sao cho
Lưu ý:

* Một số trường hợp đặc biệt:
|
Hai dao động cùng pha: Δφ=2kπ. Từ đó tính được: AMax=A1+A2 |
|
|
Hai dao động ngược pha: Δφ=(2k±1)π. Từ đó tính được: AMin= |
|
|
Hai dao động vuông pha: Δφ=(k+0,5)π. Từ đó tính được: |
|
|
Tổng quát: \( A = \sqrt {A_1^2 + A_2^2 + 2{A_{1}}{A_{2}}{\rm{cos}}\alpha } \) Với \(\alpha = \left( {\overrightarrow {{A_{1}}} ,\overrightarrow {{A_{2}}} } \right)\) |
 |



* Xác định dao động thành phần: Khi biết một dao động thành phần và dao động tổng hợp. Tìm dao động thành phần còn lại.
3. Cách bấm máy tính tìm dao động tổng hợp:
+ Chuyển máy sang Radian: Shift Mode 4
+ Chuyển máy sang chế độ số phức CMPLX
+ A1∠ φ1+ A2∠ φ2
+ Bấm = cho kết quả.
+ shift 2 3 cho ra nghiệm.